Industrial machinery, application of hand
Manipulator in the mechanization and
automation of the production process developed a new type of device.,cnc milling machine In recent
years, as electronic technology, especially computer extensive use of robot
development and production of
high-tech fields has become a rapidly
developed a new technology, which further promoted the development of robot,
allowing robot to better achieved with the combination of mechanization and
automation.
Although the robot is not as flexible as
staff, but it has to the continuous duplication of work and labor, I do not
know fatigue, not afraid of danger, the power snatch weight characteristics
when compared with manual large, therefore, mechanical hand has been of great
importance to many sectors, and increasingly has been applied widely, for
example:
(1)
Machining the workpiece loading and unloading, especially in the automatic
lathe, combination machine tool use is more common.
(2) In the assembly operations are widely
used in the electronics industry, it can be used to assemble printed circuit
boards, in the machinery industry It can be used to assemble parts and
components.
(3) The working conditions may be poor,
monotonous, repetitive easy to sub-fatigue working environment to replace human
labor.
(4)
May be in dangerous situations, such as military goods handling, dangerous
goods and hazardous materials removal and so on.
(5) Universe and ocean development.
(6),
military engineering and biomedical research and testing. Help mechanical hands: also known as the
balancer, balance suspended, labor-saving spreader, manual Transfer machine is
a kind of weightlessness of manual load system, a novel, time-saving technology
for material handling operations booster equipment, belonging to kinds of
non-standard design of series products. Customer application needs, creating
customized cases. Manual operation of a simulation of the automatic machinery,
it can be a fixed program draws ﹑ handling
objects or perform household tools to accomplish certain specific actions.
Application of robot can replace the people engaged in monotonous ﹑ repetitive or heavy manual labor, the mechanization and automation
of production, instead of people in hazardous environments manual operation,
improving working conditions and ensure personal safety.
The late 20th century, 40, the United
States atomic energy experiments, the first use of radioactive material
handling robot, human robot in a safe room to manipulate various operations and
experimentation. 50 years later, manipulator and gradually extended to
industrial production sector, for the temperatures, polluted areas, cnc milling machine and loading
and unloading to take place the work piece material, but also as an auxiliary
device in automatic machine tools, machine tools, automatic production lines
and processing center applications, the completion of the upper and lower
material, or From the library take place knife knife and so on according to
fixed procedures for the replacement operation. Robot body mainly by the hand
and sports institutions. Agencies with the use of hands and operation of
objects of different occasions, often there are clamping ﹑ support and adsorption type of care. Movement organs are generally
hydraulic pneumatic ﹑ ﹑ electrical device drivers.
Manipulator can be achieved independently
retractable ﹑ rotation and lifting
movements, generally 2 to 3 degrees of freedom. Robots are widely used in
metallurgical industry, machinery manufacture, light industry and atomic energy
sectors. Can mimic some of the staff and
arm motor function, a fixed procedure for the capture, handling objects or
operating tools, automatic operation device. It can replace human labor in
order to achieve the production of heavy mechanization and automation that can
operate in hazardous environments to protect the personal safety, which is
widely used in machinery manufacturing, metallurgy, electronics, light industry
and nuclear power sectors. Mechanical hand tools or other equipment commonly
used for additional devices, such as the automatic machines or automatic
production line handling and transmission of the workpiece, the replacement of
cutting tools in machining centers, etc. generally do not have a separate
control device. Some operating devices require direct manipulation by humans;
such as the atomic energy sector performs household hazardous materials used in
the master-slave manipulator is also often referred to as mechanical hand.
Manipulator mainly by hand and sports
institutions. Task of hand is holding the workpiece (or tool) components,
according to grasping objects by shape, size, weight, material and operational
requirements of a variety of structural forms, such as clamp type, type and
adsorption-based care such as holding. Sports organizations, so that the
completion of a variety of hand rotation (swing), mobile or compound movements
to achieve the required action, to change the location of objects by grasping
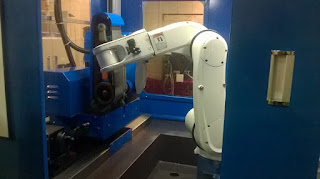
and posture. Robot is the automated production of a kind used in the process of
crawling and moving piece features automatic device, which is mechanized and
automated production process developed a new type of device. In recent years,
as electronic technology, especially computer extensive use of robot
development and production of high-tech fields has become a rapidly developed a
new technology, which further promoted the development of robot, allowing robot
to better achieved with the combination of mechanization and automation. Robot
can replace humans completed the risk of duplication of boring work, to reduce
human labor intensity and improve labor productivity. Manipulator has been
applied more and more widely, in the machinery industry, it can be used for
parts assembly, work piece handling, loading and unloading, particularly in the
automation of CNC machine tools, modular machine tools more commonly used.
At present, the robot has developed into a
FMS flexible manufacturing systems and flexible manufacturing cell in an
important component of the FMC. The machine tool equipment and machinery in
hand together constitute a flexible manufacturing system or a flexible
manufacturing cell, it was adapted to small and medium volume production, you
can save a huge amount of the work piece conveyor device, compact, and
adaptable.cnc milling machine When the work piece changes, flexible production system is very easy
to change will help enterprises to continuously update the marketable variety,
improve product quality, and better adapt to market competition.
At present, China's industrial robot
technology and its engineering application level and comparable to foreign
countries there is a certain
distance, application and industrialization
of the size of the low level of robot research and development of a direct
impact on raising the level of automation in China, from the economy, technical
considerations are very necessary. Therefore, the study of mechanical hand
design is very meaningful.